全面解析塑膠托盤 從材質選擇到應用場景的視覺指南
塑膠托盤,又稱塑料托盤或塑膠墊板,是現代物流、倉儲及生產環節中不可或缺的基礎載運單元。其以塑膠(主要為聚乙烯PP或高密度聚乙烯HDPE)為主要原料,通過注塑、吹塑等工藝制成,具有輕質、耐用、衛生、易清潔及可回收等顯著優點。本文將通過解析其核心特點與展示典型圖片,幫助您全面了解這一重要物流器具。
一、 核心材質與工藝特點
塑膠托盤主要分為兩大類:
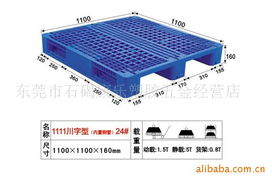
- 注塑托盤:最常見類型。一次注塑成型,結構致密,表面光滑,承載力強且尺寸精度高。圖片中常見的網格狀或平板狀九腳、川字、田字底結構的托盤多屬此類,顏色多樣(常見藍色、黑色、紅色)。
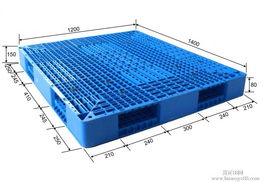
- 吹塑托盤:多為中空結構,抗沖擊性能極佳,尤其適合低溫環境,但自重通常較大。外觀上更為渾厚,多用于重載行業。
從圖片中觀察,優質的塑膠托盤邊角圓潤無毛刺,筋肋分布均勻,這直接關系到其使用壽命和承載穩定性。
二、 主要結構類型與視覺辨識
通過托盤圖片,我們可以清晰區分其設計結構,這直接關聯其使用場景:
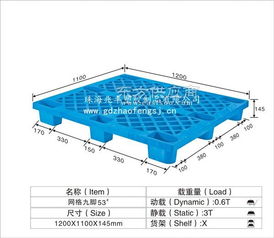
- 九腳托盤:底部有九個支撐腳,適用于手動液壓叉車、倉儲貨架及自動化立體庫。圖片顯示其四面可進叉,靈活性高。
- 川字托盤:底部橫梁呈“川”字形,便于叉車三向進叉,是地面周轉和堆碼的通用選擇。
- 田字托盤:底部支撐呈“田”字網格,底面平整,適合輸送線自動化搬運,穩定性好。
- 雙面托盤:兩面結構均可用以承載貨物,可實現正反面堆碼,圖片中可見其兩面均有平整的承載面或網格。
三、 應用場景圖例展示
在各類行業圖片中,塑膠托盤的身影無處不在:
- 倉儲物流:在標準化立體貨架上,整齊堆碼的藍色川字托盤承載著箱裝貨物,極大提升了空間利用率和存取效率。
- 食品醫藥:由于符合衛生標準、易清洗且防潮防蛀,白色或藍色的平板塑膠托盤廣泛用于潔凈車間和冷庫。
- 制造生產:在生產線旁,田字托盤作為工序間的載體,平穩地在輸送線上移動。
- 出口運輸:經過熏蒸處理的塑膠托盤(通常會有IPPC標識),在集裝箱裝載圖片中常見,避免了木質托盤的檢疫壁壘。
四、 選購與使用要點
查看產品圖片時,也應關注以下細節以判斷其質量:
- 材質:全新料制成的托盤色澤均勻、韌性好;回收料制品顏色可能渾濁、有雜質,性能不穩定。
- 設計:是否有防滑墊(增加貨物穩定性)、倒角設計(保護貨物及人員安全)以及加強筋的布局。
- 標識:正規產品通常會模壓上承載重量(動載、靜載、貨架載)、生產廠家、材質等信息。
塑膠托盤不僅是一張簡單的塑料墊板圖片,其背后是經過精密設計的物流解決方案。選擇合適的類型,對于提升物流效率、降低運營成本、保障貨物安全至關重要。在實際選購時,建議結合具體的承載需求、搬運設備及使用環境,參考實物或高清細節圖片,做出最佳決策。
如若轉載,請注明出處:http://m.hkcompass.cn/product/77.html
更新時間:2026-06-19 18:41:18